
Latest news
Successful position guiding
This week the team managed to show a first successful position tracking. Currently, the base station operator sends a target position to the drone which then guides the human to the desired position.
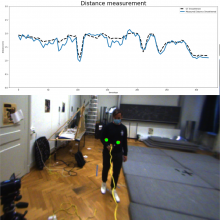
Depth estimation
This week, the depth estimation of the human has been realized and verified. Thanks to the calibration shapes on the handle of the operator, an algorithm estimates the distance between the drone and the human. This information can then be used in a further step to properly scale the optical flow, obtaining an estimation of the relative velocity.
Preliminary human velocity estimantion
Oliver just obtained some promising results about the vision-based estimation of the human velocity. To be able to apply the right amount of force to the cable that guides the person, the velocity of the human has to be taken into account. The thesis of Oliver investigates how to measure the relative velocity of the human with respect to the robot using onboard visual sensors. By measuring the displacement of certain points in the image for consecutive frames, the optical flow of the object is measured.

Safe enough?
We are setting up our platform for the next set of experiments. This means tuning and making the system as reliable as possible. When drones physically interact with humans, safety is a crucial aspect.
